O型密封圈的仿真在密封行業很普遍,一般有兩個過程,先是密封圈的拉伸過程,再者就是密封圈的壓縮過程,在此篇文章之前,有一篇文章(靜力學-8)已經仿真出這兩個過程,這篇文章,筆者打算來淺述一下拉伸過程中的仿真參數的某些設置。
Ps:材料參數與靜力學-8中一致。
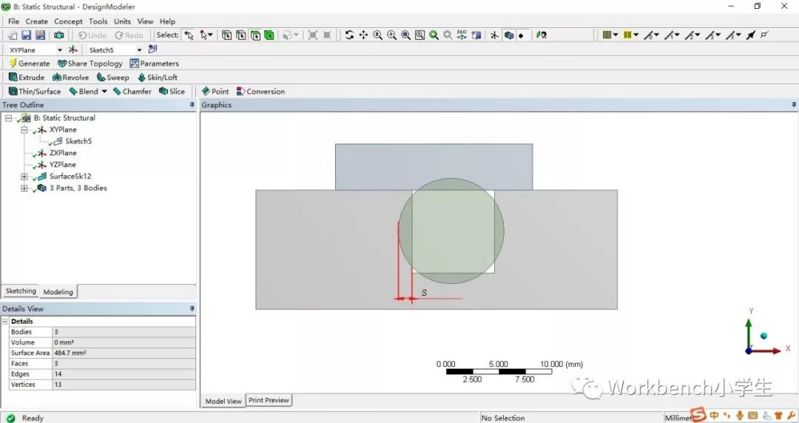
1.建立過盈配合模型
注意:
模型在Dm中建立,中間圓形就是O型密封圈,s為密封圈與槽的過盈量。
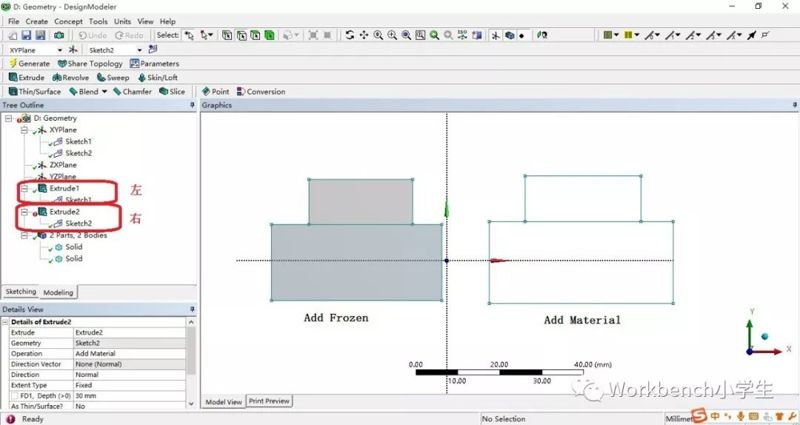
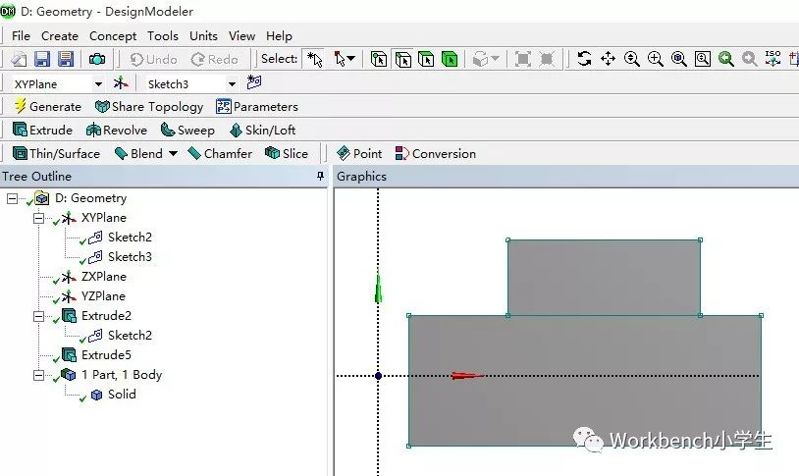
通常建模的時候,如果接觸在一塊的草圖無論是拉伸或者生成面體中的Add Material都會產生報錯(下圖1),或者明明是兩個part,但是點擊生成的時候會發現只產生了一個part(下圖2),那是因為AddMaterial選項將兩者合并了,因此在拉伸或者生成面體的時候必須使用Add Frozen選項進行凍結。

2.建立接觸對
注意:
任何可能接觸或已經接觸的部分都需要設置接觸,否則會發生求解失敗。
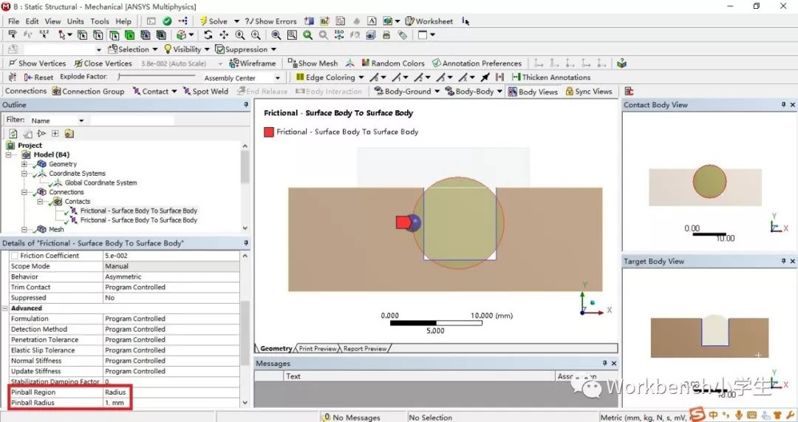
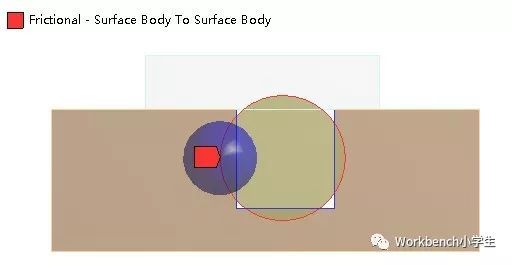
如果建立了過盈模型,那么就需要設置Pinball的值,這個Pinball的R半徑設置多少呢?我們來查看一下Help文檔中對Pinball的解釋:
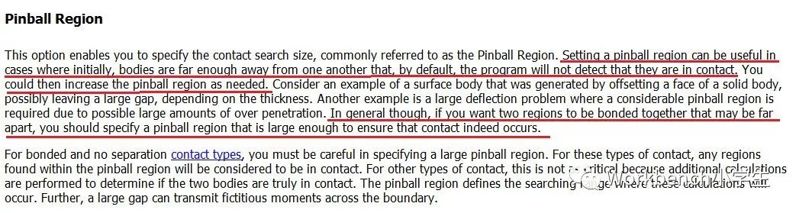
根據Help文檔,這個Pinball叫做彈球區域,它的作用是為了設置一個接觸區域,使橡膠墊片包含在區域中的兩個物體即使距離較遠或者初始穿透量較大的物體依然判定為接觸,由于自動探測接觸功能的存在,一般會自動建立已經接觸的單元,但是如果兩個物體距離較遠,系統自動檢測不到之間存在接觸單元,那么如果Pinball的默認值(系統默認)不滿足自動檢測,求解過程就會報錯,換句話說,在Pinball彈球區域內,不管距離多遠或者初始穿透量多大,都被認為是接觸。
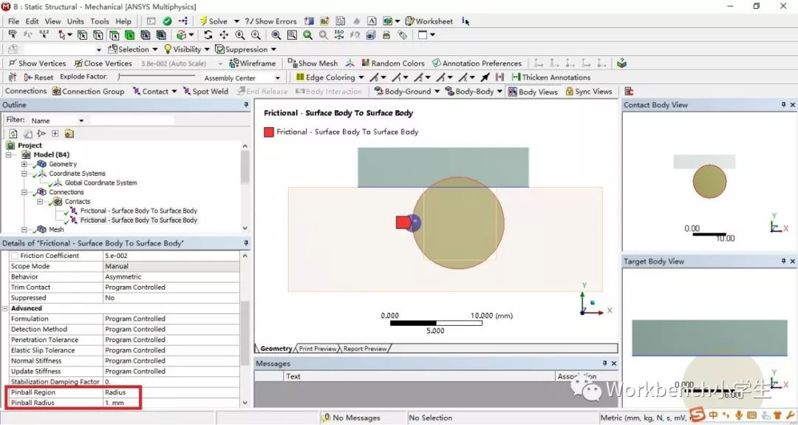
但是從此圖可以看出,雖然設置了接觸,但是紅色的接觸邊與藍色的目標邊未同時存在于藍色的Pinball彈球區域內,我們嘗試求解:直接出現不收斂,這是由于彈球區域的大小設置有誤,系統無法探測到此接觸對而報錯。
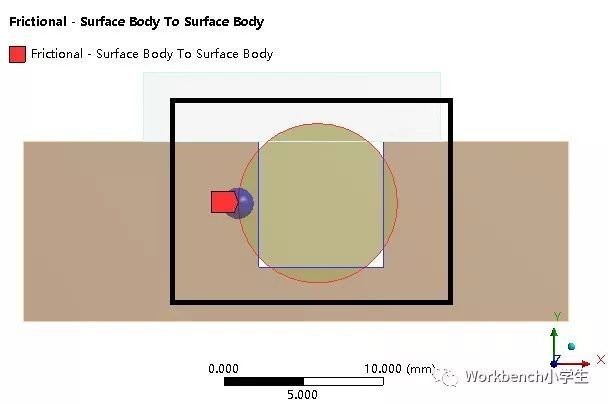
 3.修改Pinball的半徑
3.修改Pinball的半徑
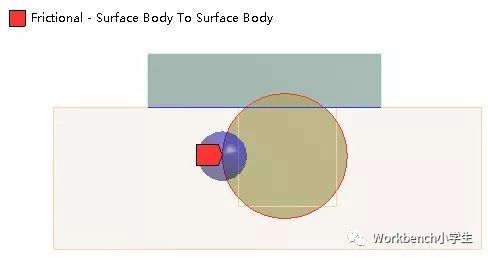
從上圖可以看出,圖中標注的R即為Pinball的半徑,紅色加粗線為接觸邊,藍色加粗線為目標邊,無論彈球的位置在哪,它都會以彈球半徑中心似圓環陣列出若干個圓,在任意一個圓內的接觸,即使有初始穿透或Gap,都會默認為接觸。
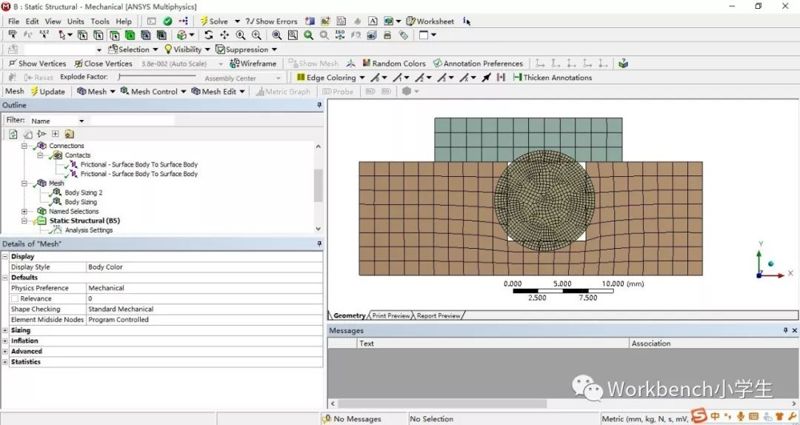
4.建立Mesh
 注意:
注意:
本案例Mesh網格的需要進一步加密,在Mesh的選項中,除了各種劃分網格的操作外,還有低階單元及高階單元的設置,這兩者的使用情況可以參考周炬老師的靜力學(公眾號書籍推薦有)書中的詳細解析,筆者不在此敘述。
5.建立分析設置
注意:
這里的子步數量可以參考前幾篇文章中的子步解釋,在此并不贅述。
如果存在剛體位移的話,可以打開弱彈簧,但是盡量關閉弱彈簧,以減小弱彈簧對整個系統做功的影響。
6.建立邊界條件
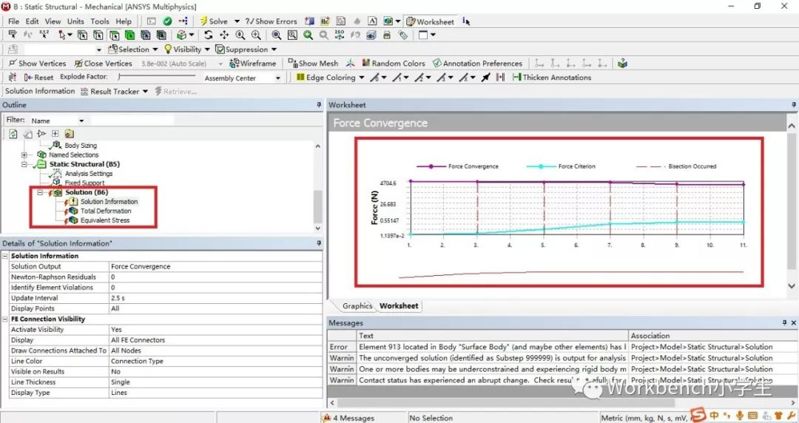
7.完成求解
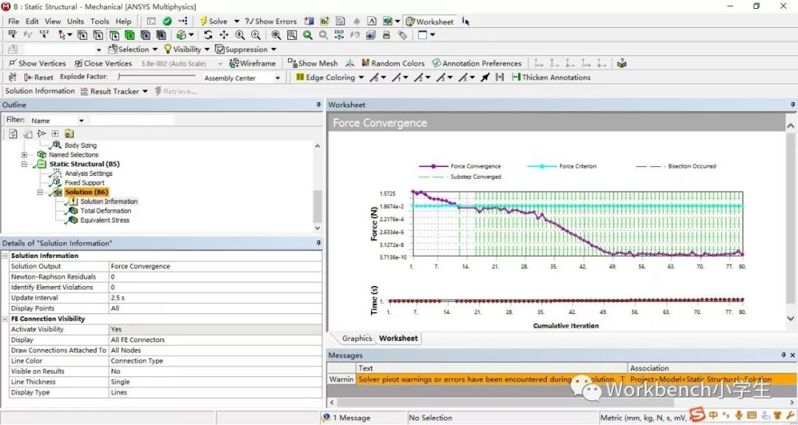
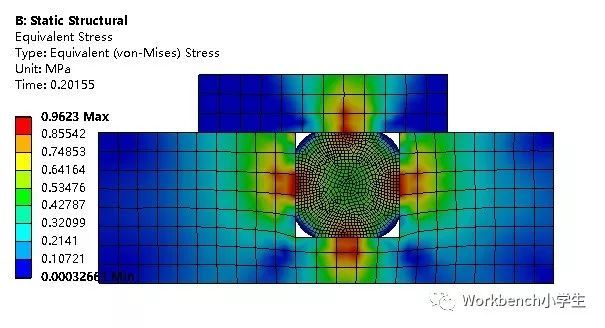
但是從上圖中發現一個警告,打開求解信息,發現使用的求解器類型為分布式稀疏求解器(Direct),如下所示:
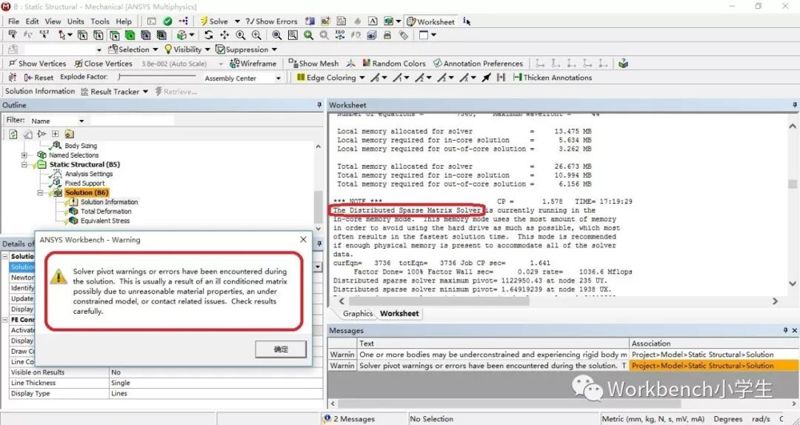
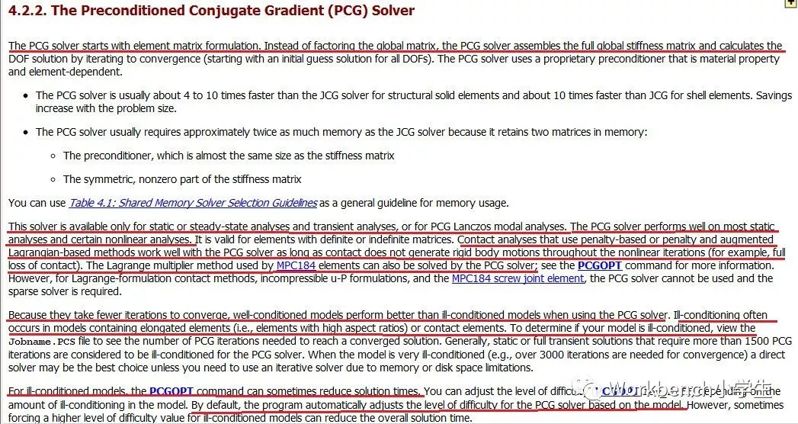
粗略的講,在workbench中,求解器類型一種有兩種:Direct和Iterative。Direct的算法是基于消除方程組,并將稀疏的剛度矩陣分解為下三角矩陣,這種方法需要較大的硬盤和內存,雖然是基于方程組消除,但是容易奇異的矩陣在求解時并不會產生困難(容易收斂),但是會影響結果的精度,而Iterative(PCG、JCG、ICCG等等)求解器并不是分解矩陣消除方程組,而是進行矩陣的組裝,它適用于求解未知和已知的剛度矩陣,并且在絕大多數靜態分析中能夠很好的解決非線性問題,如下圖所示:
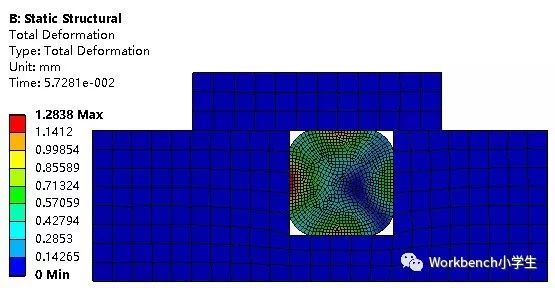
因此修改求解器算法為Iterative,再次求解。
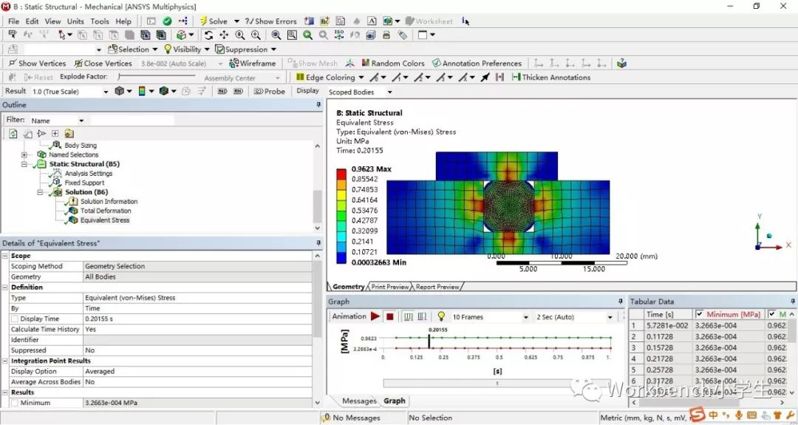
從圖中可以看出整個求解過程并未產生任何warning與error,因此無論出現warning與error,都必須對其進行查看并處理,否則求解的結果可能會不準確。
雖然應力的值與分布式稀疏求解器求解出的值相同,這是由于簡單模型的緣故,如果遇到復雜模型,就不一定了。
總結:此篇文章也就到此為止了,希望繼續關注后續推文。